散列表
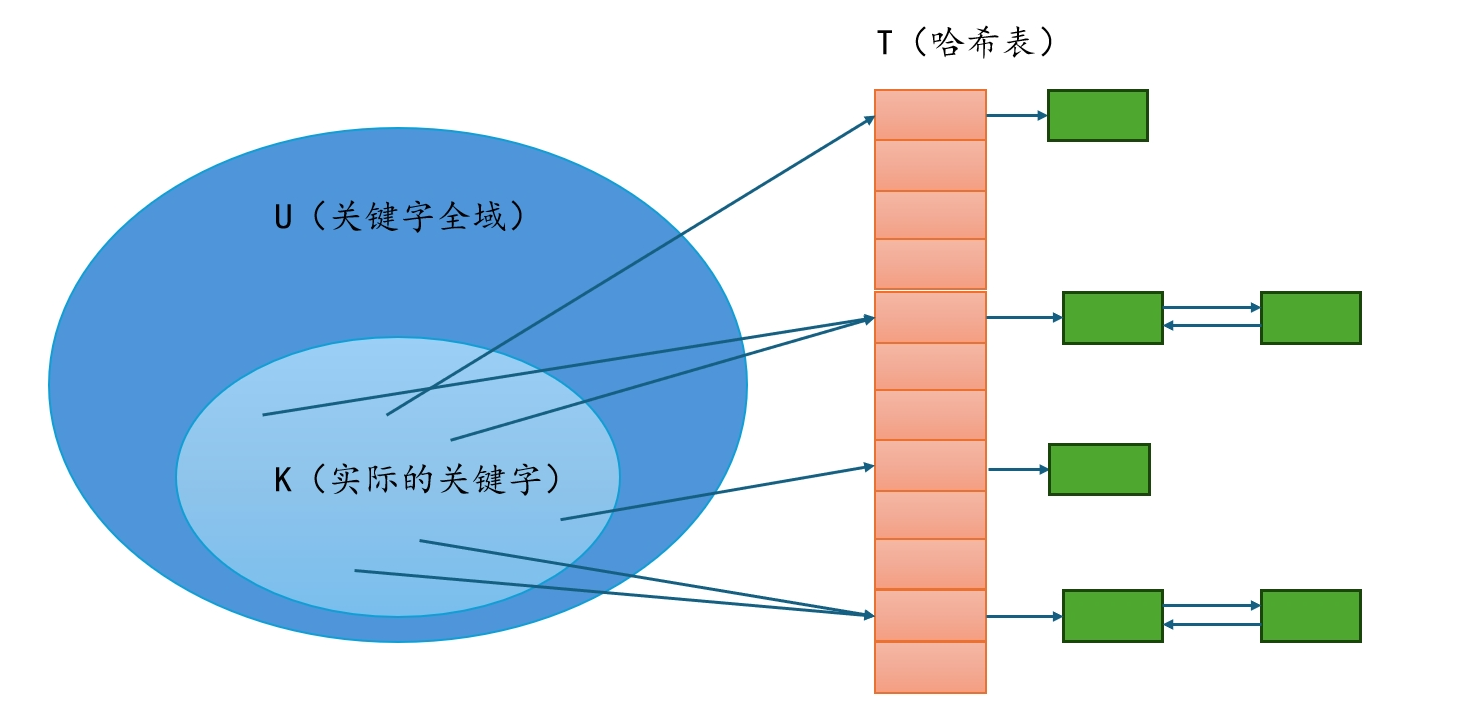
散列表(Hash Table),也称为哈希表,是一种通过哈希函数将键(Key)映射到表中一个位置以便快速访问记录的数据结构。它的主要目的是提供快速的数据插入、删除和查找操作。散列表通常由数组支持,这个数组称为“槽”或“桶”,数组的每个位置对应一个可能的哈希值。
大量键值对存储时:
- 如果使用数组,并使用键作为索引,则当键的取值范围很广,但键值对数量却不多时:需要开辟很大的数组空间,却只有很少数空间被使用,造成空间浪费。
- 所以,我们希望通过hash function将原本稀疏散落在数组各处的键值对,通过函数映射,集中存放在一个更小的空间中,提高空间利用率。
散列表的基本操作包括:
- 插入(Insert):将一个新的键值对插入到散列表中。
- 查找(Search):通过给定的键快速找到对应的值。
- 删除(Delete):从散列表中删除一个键值对。
散列表的工作原理如下:
- 哈希函数(Hash Function):选择一个合适的哈希函数,它能够将输入的键(可以是任意数据类型)转换为数组索引。一个好的哈希函数应该能够均匀地将键分布在数组的索引上,以减少冲突。
- 冲突解决(Collision Resolution):由于不同的键可能会映射到同一个索引上,这种情况称为冲突。解决冲突的方法有:
- 链地址法(Chaining):每个数组索引处都有一个链表,所有映射到该索引的键值对都存储在这个链表中。
- 开放寻址法(Open Addressing):如果发生冲突,寻找表中的另一个空闲位置来存储该键值对。常见的开放寻址策略有线性探测、二次探测和双重散列。
冲突解决
链地址法
在链地址法(chaining)中,每个数组索引(或称为“槽”或“桶”)都关联一个链表,所有映射到该索引的元素都会被存储在这个链表中。
链地址法的插入、查找、删除操作的伪代码如下:
1 | CHAINED-HASH-INSERT(T ,x) |
给定一个能存放 n 个元素的、具有 m 个槽位的散列表 T。定义 T 的装载因子(load factor) α 为n/m,即:一个链的平均存储元素数。
插入操作:将新的元素链接到对应链表的头部,用时**O(1)**。
删除操作:**如果是双向链表,用时O(1)**。如果是单向链表,用时与搜索操作时间相近。
注意,这里删除操作
CHAINED-HASH-DELETE(T,x)以元素 x 而不是它的关键字 k 作为输入,所以无需先搜索 x。搜索操作:
在简单均匀散列的假设下,对于用链接法解决冲突的散列表,一次不成功查找的平均时间为 Θ(1 + α) 。
证明:如果查找的关键字 k 不在哈希表中,则需要首先找到对应槽的链表,再遍历整个链表,确定关键字 k 不在哈希表中。而链表的长度期望是 α 。所以总用时是:Θ(1 + α) 。
在简单均匀散列的假设下,对于用链接法解决冲突的散列表,一次成功查找所需的平均时间为 Θ(1 + α) 。
证明:如果查找的关键字 k 在哈希表中,则需要先找到对应槽的链表,再搜索该链表。链表期望长度是 α ,关键字 k 等可能地出现在链表第1、2、……、α 个位置。所以总用时是:Θ(1 + (1+α)/2) = Θ(1 + α) 。
综上,当n、m数量级相近时,即n=O(m)时:链地址法的所有字典操作均是 O(1) 时间。
python代码实现大致如下:
1 | # 双向链表 |
开放寻址法
在开放寻址法(open addressing) 中,所有的元素都存放在散列表里。这里既没有链表,也没有元素存放在散列表外。因此在开放寻址法中,散列表可能会被填满,且装载因子 α 不超过1。
插入操作
两个不同的键被哈希函数映射到同一个索引时,开放寻址法会再寻找新的空位索引,直至找到,再存放新插入的键值对。
插入操作伪代码如下:
HASH-INSERT(T,x)将元素 x 插入到哈希表 T 中。如果第一次 hash 后的位置冲突了,则会再做第2、3……次 hash,直至找到空位用以插入新元素。所以**开放寻址法的 hash 函数需要两个参数:关键字 k 和第几次 i **。
1 | HASH-INSERT(T,x) |
常见探查方法,也即是对应的哈希函数有:
线性探查:
当发生冲突时,通过按顺序查找下一个空闲位置来存储键值对。

线性探查方法比较容易实现,但它存在着一个问题(群集现象):
当一个空槽前有 i 个满的槽时,该空槽为下一个将被占用的概率是 (i+1)/m。连续被占用的槽就会变得越来越长,因而平均查找时间也会越来越大。
随着连续被占用的槽不断增加,平均查找时间也随之不断增加。
二次探查:
为了减轻线性探查的群集现象,我们每次往后推移二次函数个位置,进行探查。

双重散列:
双重散列通过两个不同的哈希函数来计算候选位置。

查找操作
查找操作与插入操作类似。
查找操作伪代码如下:
1 | HASH_SEARCH(T,k) |
删除操作
采用开放寻址法时,删除操作是难以实现的。
例如:在插入关键字 k 时,发现槽 i 被占用了,则 k 就被插入到后面的位置上。此时我们欲将槽 i 中的关键字删除,那么就无法检索到关键字 k 了。
所以,删除操作不能直接删除,置为NIL,而是:删除后需要将槽标记为DELETED。
为此,在必须具备删除操作的情形下,一般不采用开放寻址法,而采用链地址法。
算法分析
给定一个装载因子为 α=n/m < 1 的开放寻址散列表,并假设是均匀散列的,则对于一次不成功的查找,其期望的探查次数至多为 1/(1 - α) 。
证明:
对于一个不成功的探查,我们假设经历了 X 次探查。
对于第 i 次探查,如果是空位,则我们知道散列表中没有该关键字,否则还需要继续探查。
现在有 n 个元素和 m 个槽。


对于一个装载因子为 α < 1 的开放寻址散列表,假设采用均匀散列,且表中的每个关键字被查找的可能性是相同的,一次成功查找中的探查期望数至多为 1/α · ln(1/(1-α)) 。
证明:
查找操作中所遍历的位置序列,与插入该关键字 k 时所遍历的位置序列是相同的。
假设 k 是第 i+1 个插入的关键字,则由上一定理,k 的探查的期望次数至多为 m/(m-i) 。
对散列表中所有 n 个关键字求平均,则得到一次成功查找的探查期望次数为:

哈希函数
哈希函数将关键字所组成的域到散列表索引所组成的域。
一个好的哈希函数应(近似地)满足简单均匀散列假设:每个关键字都被等可能地散列 m 个槽位中的任何一个,并与其他关键字已散列到哪个槽位无关。
此外,哈希函数的某些情况可能会要求比简单均匀散列更强的性质。例如,可能希望某些很近似的关键字具有截然不同的散列值。
除法散列法
通过取 k 除以 m 的余数,将关键字 k 映射到 m 个槽中的某一个上。

当应用除法散列法时,要避免选择 m 的某些值。例如,m 不应为 2 的幂,因为如果 m=2p,则 h(k) 就是 k 的 p 个最低位数字。
一个不太接近 2 的整数幂的素数,常常是 m 的一个较好的选择。
乘法散列法
乘法散列法分两步:
用关键字 k 乘上常数 A (0<A<1),并提取 kA 的小数部分。
用 m 乘以这个值,再向下取整。

乘法散列法的一个优点是:对 m 的选择不是特别关键,一般选择它为 2 的某个幂次(m=2p, p为某个整数)。这是因为如此在计算机上容易表示。
虽然这个方法对任何的A 值都适用,但对某些值效果更好(如:黄金分割比例倒数)。
全域散列法
一般情况下,哈希函数能将随机的输入均匀的映射到散列表的各个槽中。
但是如果有人恶意针对某个固定的哈希函数,故意输入n个关键字,被哈希函数映射到同一个槽中,那么平均检索时间退化为 Θ(n) 。
为了避免这种困境,我们将随机地选择哈希函数。这种方法称为:全域散列(universal hashing)。
当然,随机选择并不是乱选,而是从一组预先设计(全域的)的函数 H 中,随机地选择一个哈希函数 h。
设 H 为一组有限的散列函数,它们将关键字全域 U 映射到 {0, 1, …, m-1} 中。如果它们对每一对不同的关键字 k,l ∈ U,满足 h(k) = h(l) 的散列函数 h ∈ H 的个数至多为 |H|/m,那么这组函数 H 称为全域的(universal)。
这表明了两点性质:
- 如果从 H 中随机地选择一个散列函数,当关键字 k ≠ l 时,两者发生冲突的概率不大于 1/m。
- 这也正好是从集合{0, 1, …, m-1} 中独立地随机选择 h(k) 和 h(l) 时发生冲突的概率。
我们可以证明,全域散列法能均匀地将关键字映射进各个槽中。
如果 h 选自一组全域散列函数,将 n 个关键字散列到一个大小为 m 的表 T 中,并用链接法解决冲突。
- 如果关键字 k 不在表中,则 k 被散列到的链表的期望长度 E[nh(k)] 至多为 α = n/m。
- 如果关键字 k 在表中,则包含关键字 k 的链表的期望长度 E[nh(k)] 至多为 **1+ α**。
证明:
由于上述的性质1,我们知道:对于每一个关键字 k,其余关键字与之冲突的概率 ≤ 1/m。所以与 k 映射到同一个槽的关键字个数的期望为:n/m = α。
- 如果关键字 k 不在表中,则 k 被散列到的链表的期望长度至多为 α = n/m。
- 如果关键字 k 在表中,则计数时需要算上 k,所以再 +1。
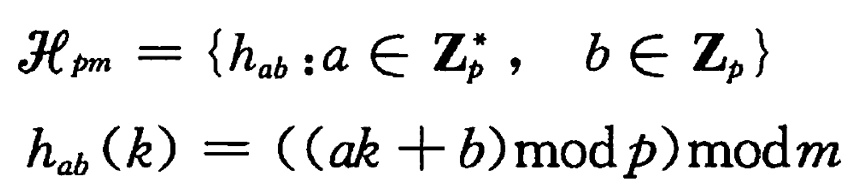
如何设计一组全域哈希函数呢?
选择一个足够大的素数 p,使得每一个可能的关键字 k 都落在 [0, p-1] 。
完全散列
当关键字集合是静态(static)时,散列技术也能提供出色的最坏情况性能。所谓静态,就是指一旦各关键字存入表中,关键字集合就不再变化了。
针对这一情形,我们采用:完全散列(perfect hashing)。
如果该方法进行查找时,能在最坏情况下用 O(1) 时间完成。
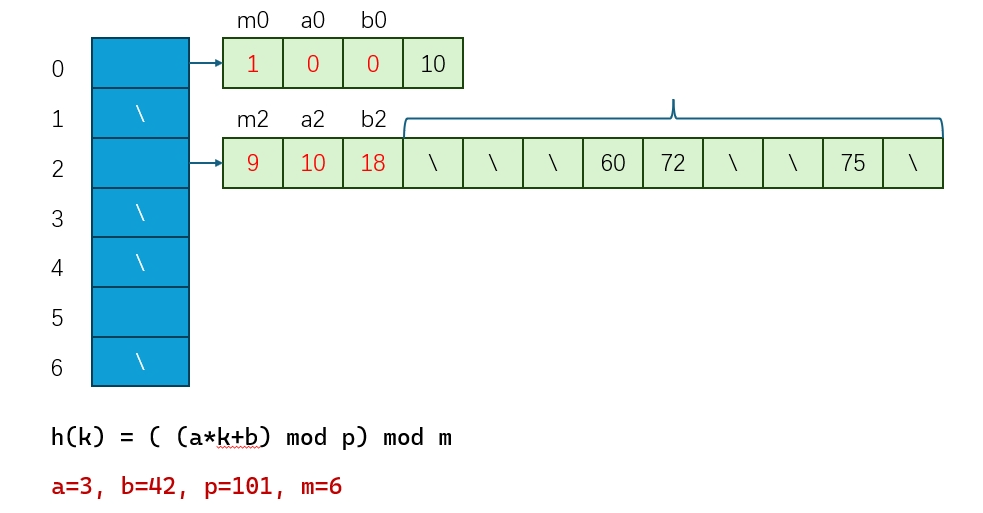
我们采用两级的散列方法来设计完全散列方案,在每级上都使用全域散列。
- 第一级与链地址法相同:从一组全域哈希函数中选出一个函数 h,将 n 个关键字映射到 m 个槽中。
- 第二级中,我们建立一个较小的散列表。
- 通过选取合适的哈希函数 hi,保证第二级散列表上不会发生冲突。(从一组全域哈希函数中随机选,如果冲突,则随机再选,直到选出。)
- 第二级散列表 Si 的大小 mi 总是被散列到槽中的元素个数 ni 的平方。
我们可以证明:在第二级散列表选取哈希函数时,比较容易选出一个哈希函数,不存在冲突。
如果从一个全域散列函数类中随机选出散列函数 h,将 n 个关键宇存储在一个大小为 m = n2 的散列表中,那么表中出现的冲突个数的期望小于 1/2。

此外,我们可以证明:通过合适地选取第一级哈希函数,预期使用的总空间大小为 O(n)。

python 代码实现如下:
1 | import random |